机器人运动控制简介
1. ros2_control
- ros2_control是一套软件包,它包含了控制器接口,控制器管理器,传输和硬件接口。它是机器人控制的中间件,是一套规范,不同的机器人平台只要按照这套规范实现,就可以保证与ROS程序兼容,通过这套规范,实现了一种可插拔的架构设计。
- ros2_control框架有以下软件包组成(https://github.com/ros-controls/ros2_control)
- ros_control 框架的主要接口和组件
- ros2_controllers 控制器,如前进指令控制器、关节轨迹控制器、差速控制器
- control_toolbox 一些被控制器广泛使用的控制理论的实现
- realtime_tools 用于实时性支持的通用工具包,如实时缓冲区和发布程序
- control_msgs 通用的消息
2. Gazebo对ros2_control的实现
Gazebo是一个独立的应用程序,支持ros和ros2。Gazebo与任何一个版本的ROS都是通过一组名为gazebo_ros_pkgs的功能包集来实现交互的。这些功能包集建立起来Gazebo与ROS2的消息服务之间的桥梁。
ros2中gazebo_ros_pkgs的组成
- gazebo_dev 为支持ros发行版的Gazebo默认版提供cmake的配置,因此,下游的功能包可以之依赖gazebo_dev,而无需查找Gazebo。
- gazebo_msgs 用于与ROS2交互的消息与服务数据结构
- gazebo_ros 提供C++类和函数,可以被其他插件使用,如gazebo::Node,它还提供了一些常用的插件
- gazebo_plugins 一系列的Gazebo插件,将传感器和其他的特性暴露给ROS2。如,gazebo_ros_camera发布ROS2图像,gazebo_ros_diff_drive提供了通过ROS2控制和检查差速驱动机器人的接口。
gazebo_ros2_control 在ROS1中,该功能包名为gazebo_ros_control,并被作为gazebo_ros_pkgs元功能包的一个子包,而在ROS2中,它是独立的gazebo_ros2_control的功能包。
gazebo_ros2_control是一个实现了ros2_control接口的控制管理器实例,该实例将连接到Gazebo模型上。
3. 机器人运动控制的实现流程
3.1 为joint添加控制器
机器人模型采用了博客《URDF集成到Gazebo》中实操模型
新建文件gazebo_demo_move.xacro,添加差速模型
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48<robot name="my_car_move" xmlns:xacro="http://wiki.ros.org/xacro">
<gazebo>
<plugin name="mycar_diff_drive" filename="libgazebo_ros_diff_drive.so">
<ros>
<!-- <namespace>/demo</namespace> -->
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<left_joint>left_wheel2base_link</left_joint>
<right_joint>right_wheel2base_link</right_joint>
<!-- kinematics -->
<wheel_separation>${base_link_radius * 2}</wheel_separation>
<wheel_diameter>${wheel_radius * 2}</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<command_topic>cmd_vel</command_topic>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>false</publish_wheel_tf>
<odometry_topic>odom</odometry_topic>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
<plugin name="my_car_joint_state" filename="libgazebo_ros_joint_state_publisher.so">
<ros>
<!-- <namespace>/tb3</namespace> -->
<remapping>~/out:=joint_states</remapping>
</ros>
<update_rate>30</update_rate>
<joint_name>left_wheel2base_link</joint_name>
<joint_name>right_wheel2base_link</joint_name>
<joint_name>front_wheel2base_link</joint_name>
<joint_name>back_wheel2base_link</joint_name>
</plugin>
</gazebo>
</robot>从源码可以看出,需要添加控制器插件的标签,具体形式为
添加gazebo_ros_control的插件
- 差速插件 libgazebo_ros_diff_drive.so
- 关节状态发布插件 libgazebo_ros_joint_state_publisher.so,主要是解决rivz中的坐标变换问题
二者都需要在标签内指明所有需要控制的joint的名称
将上述xacro文件集成到机器人模型文件gazebo_demo_my_car.xacro中
1 | <robot name="mycar" xmlns:xacro="http://www.ros.org/wiki/xacro"> |
- 启动launch文件,运行结果如下
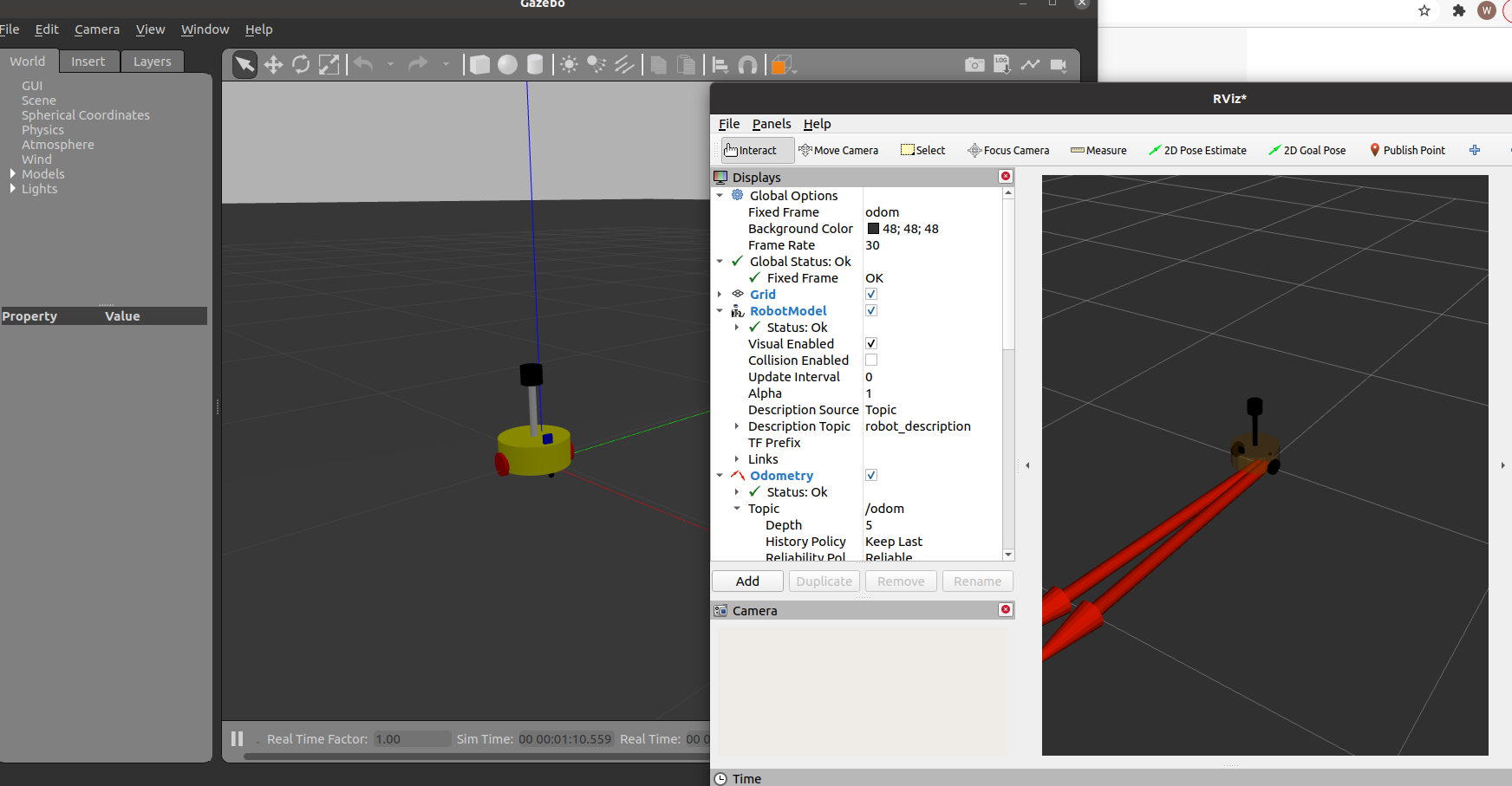
- 命令行输入指令
1 | ros2 topic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}' |
3.2 添加雷达仿真
新建gazebo_demo_sensor.xacro文件,添加雷达插件
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<gazebo reference="laser">
<sensor type="ray" name="rplidar">
<visualize>true</visualize>
<ray>
<scan>
<horizontal>
<samples>720</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<!-- Using gazebo's noise instead of plugin's -->
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<!-- Using gazebo's update rate instead of plugin's -->
<update_rate>30</update_rate>
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_ray_sensor.so">
<!-- Change namespace and output topic so published topic is /rrbot/laser/scan -->
<ros>
<namespace>/laser</namespace>
<remapping>~/out:=scan</remapping>
</ros>
<!-- Set output to sensor_msgs/LaserScan to get same output type as gazebo_ros_laser -->
<output_type>sensor_msgs/LaserScan</output_type>
<!-- <frame_name> ommited, will default to hokuo_link -->
</plugin>
</sensor>
</gazebo>
</robot>- gazebo reference 应当和机器人模型中的雷达名称相同
- sensor type 可以是ray或gpu_ray,二者目前没区别
- namespace 默认为root,可以不写
~/out:=scan topic名- output_type 可以是以下值:
- sensor_msgs/PointCloud2 3D点云(默认值)
- sensor_msgs/PointCloud 3D点云
- sensor_msgs/LaserScan 2D扫描,使用中心垂直射线
- sensor_msgs/Range 单个距离值,父传感器所有射线范围的最小值
将上述xacro文件包含到机器人模型文件中
1
2
3
4
5
6
7
8<robot name="mycar" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="gazebo_demo_inertia_head.xacro" />
<xacro:include filename="gazebo_demo_car_base.xacro" />
<xacro:include filename="gazebo_demo_camera.xacro" />
<xacro:include filename="gazebo_demo_laser.xacro" />
<xacro:include filename="gazebo_demo_move.xacro" />
<xacro:include filename="gazebo_demo_sensor.xacro" />
</robot>启动launch文件,显示如下
3.3 添加摄像头仿真
打开gazebo_demo_sensor.xacro文件,添加摄像头插件
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
...
...
<gazebo reference="camera">
<!-- 类型设置为 camara -->
<sensor type="camera" name="camera_node">
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>30</update_rate>
<camera name="intel_realsense_r200">
<horizontal_fov>1.02974</horizontal_fov>
<image>
<width>1920</width>
<height>1080</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<!-- Noise is sampled independently per pixel on each frame.
That pixel's noise value is added to each of its color
channels, which at that point lie in the range [0,1]. -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
<distortion>
<k1>0.0</k1>
<k2>0.0</k2>
<k3>0.0</k3>
<p1>0.0</p1>
<p2>0.0</p2>
<center>0.5 0.5</center>
</distortion>
</camera>
<plugin name="camera_driver" filename="libgazebo_ros_camera.so">
<ros>
<namespace>camera</namespace>
<remapping>image_raw:=camera_image</remapping>
<remapping>camera_info:=camera_info</remapping>
</ros>
<camera_name>/camera</camera_name>
<frame_name>camera</frame_name>
<hack_baseline>0.07</hack_baseline>
</plugin>
</sensor>
</gazebo>
</robot>无需修改机器人模型文件,直接启动launch文件