World文件
世界文件包含了仿真中的所有元素,如机器人,灯光,传感器和静态对象。该文件以SDF格式来表示,通常用.world作为扩展名。
Gazebo服务器(gzserver)读取这个文件并生成一个世界。Gazebo中已经集成了大量的world模型,可以参考源码https://github.com/osrf/gazebo/tree/master/worlds。
Model文件
model文件也使用SDF格式,文件内只有一个
1 | <include> |
在线模型数据库中提供了许多的model文件,在连接互联网的条件下,可以从数据库中插入任何模型,模型的内容将在Gazebo运行时自动下载。
以下是一个典型的model文件(详细信息可参考http://gazebosim.org/tutorials?tut=build_model):
1 | <?xml version='1.0'?> |
环境变量
Gazebo使用许多环境变量来定位文件,并在服务器和客户端之间建立通信。大多数情况下都可以使用默认值来编译,无须设置任何变量。
常用的环境变量如下:
- GAZEBO_MODEL_PATH:Gazebo查找所有model目录集
- GAZEBO_RESOURCE_PATH:Gazebo查找其他资源如world和media的目录集
- GAZEBO_MASTER_URI:Gazebo master的uri,用来指定启动服务器的IP和端口,并告诉客户端连接到哪里
- GAZEBO_PLUGIN_PATH:Gazebo运行时查找插件动态库的目录集
- GAZEBO_MODEL_DATABASE_URI:在线模型数据库的uri,Gazebo将从这里下载models
Gazebo Server
gzserver解析命令行中给出的world文件,然后调用物理和传感器引擎模拟出这个世界
1 | gzserver worlds/empty_sky.world |
gzserver后面的world文件名字可以是:相对于当前目录;绝对路径;相对于GAZEBO_RESOURCE_PATH表达的路径;worlds/
Graphical Client
图形客户端连接到正在运行的gzserver并将所有元素可视化,使用方法为:
1 | gzclient |
Gazebo也可将server与client组合到一起
1 | gazebo worlds/empty_sky.world |
Plugins
插件是一个与Gazebo交互的方便的机制。插件可以在命令行中加载,也可以放到sdf文件中
Gazebo首先加载命令行中指定的插件,然后加载sdf文件中指定的插件。有些插件是由gzserver加载的,如影响物理属性的插件,其他插件这是由gzclient加载的。
命令行方式如下:
1 | gzserver -s <plugin_filename> |
-s表示它是一个系统插件,
1 | gzclient --gui-client-plugin libTimerGUIPlugin.so |
实例
指定Gazebo搜索model文件的路径
在编译时指定
在package.xml文件添加如下标签
1
2
3<export>
<gazebo_ros gazebo_model_path="${prefix}/models"/>
</export>一个实际的例子:

${prefix}表示的是当前的package所在的目录urdf_tutorial,本工程中mesh文件夹位于urdf_tutorial/model路径下,因此如上图所示,gazebo_model_path被设置为${prefix}/model
另一种方法是在launch文件中添加环境变量
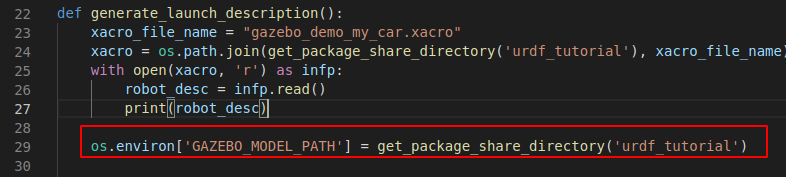
这里的含义是Gazebo运行加载世界时,要搜寻的model文件在/home/ubuntu-ros/demo_ws/install/urdf_tutorial/share/urdf_tutorial路径下,这里的install目录由colcon编译生成。
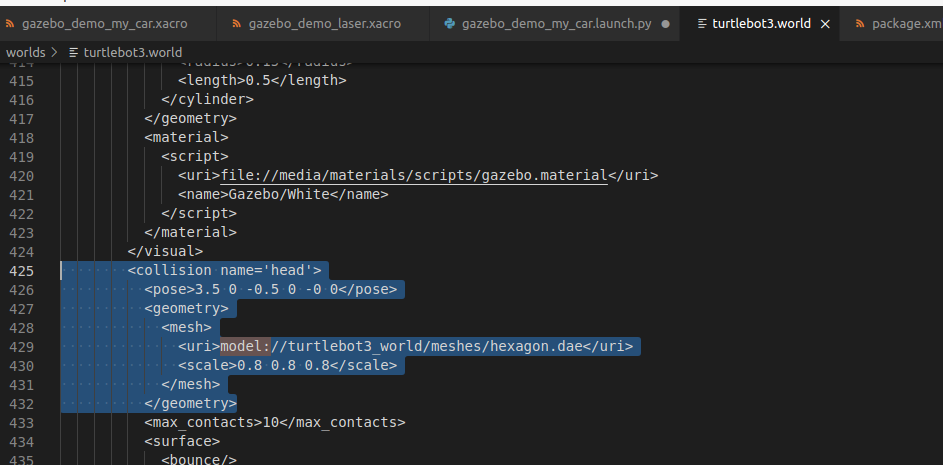
以上两种方法对应的world文件写法如下
运行时指定
1 | export GAZEBO_MODEL_PATH=/home/demo_ws/src/urdf_tutorial/model |
如此是将环境变量添加到.bashrc文件