准备工作
下载docker-ubuntu-vnc-desktop
该docker镜像装载了一个裁剪得非常多的Ubuntu 20.04,同时配置了vnc的server,因此支持通过浏览器或者vnc viewer工具访问系统的可视化界面
该docker镜像的源码地址和使用方法参考https://github.com/fcwu/docker-ubuntu-vnc-desktop#vnc-viewer,具体步骤如下:
新开一个terminal窗口,输入
sudo docker run -p 6080:80 -v /dev/shm:/dev/shm dorowu/ubuntu-desktop-lxde-vnc如果本地系统中已经存在该镜像,那么会直接运行该镜像;如果本地不存在该镜像,那么会先执行下载,待下载完成之后,启动该镜像
也可以直接输入以下命令,拉取该镜像,然后执行上一条命令
sudo docker pull dorowu/ubuntu-desktop-lxde-vnc在浏览器输入http://127.0.0.1:6080
更多操作
指定启动的可视化界面的分辨率
sudo docker run -p 6080:80 -e RESOLUTION=1920x1080 -v /dev/shm:/dev/shm dorowu/ubuntu-desktop-lxde-vnc默认的desktop用户(默认是root),如果需要指定其他用户和密码
1
sudo docker run -p 6080:80 -e USER=doro -e PASSWORD=password -v /dev/shm:/dev/shm dorowu/ubuntu-desktop-lxde-vnc
停止容器的运行
sodo docker ps -l查看当前运行的docker
sudo docker stop 1942ecad9413再次查看容器列表
重新启动已经exit的容器
sudo docker restart 1942ecad9413
该容器中的基本工具
命令行窗口LXTerminal
浏览器
安装ROS2
安装foxy版本
配置ros2 apt的仓库
apt update && sudo apt install curl gnupg2 lsb-release1
curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
1
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
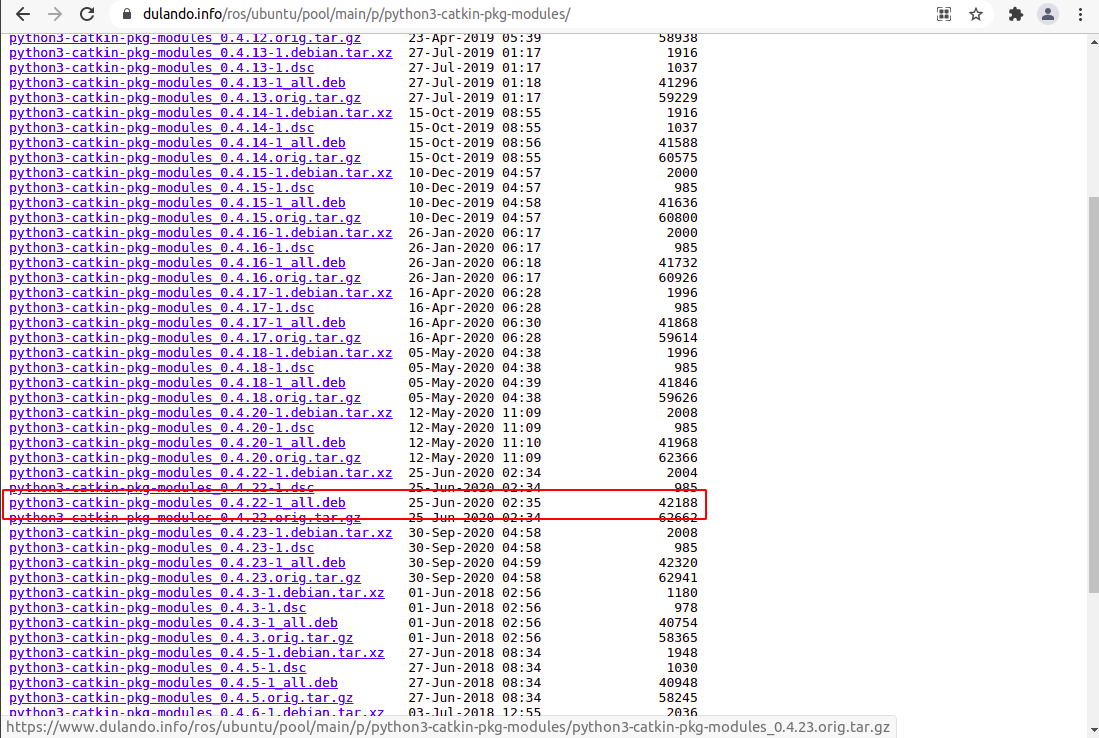
下载ros2的deb包,下载链接https://github.com/ros2/ros2/releases
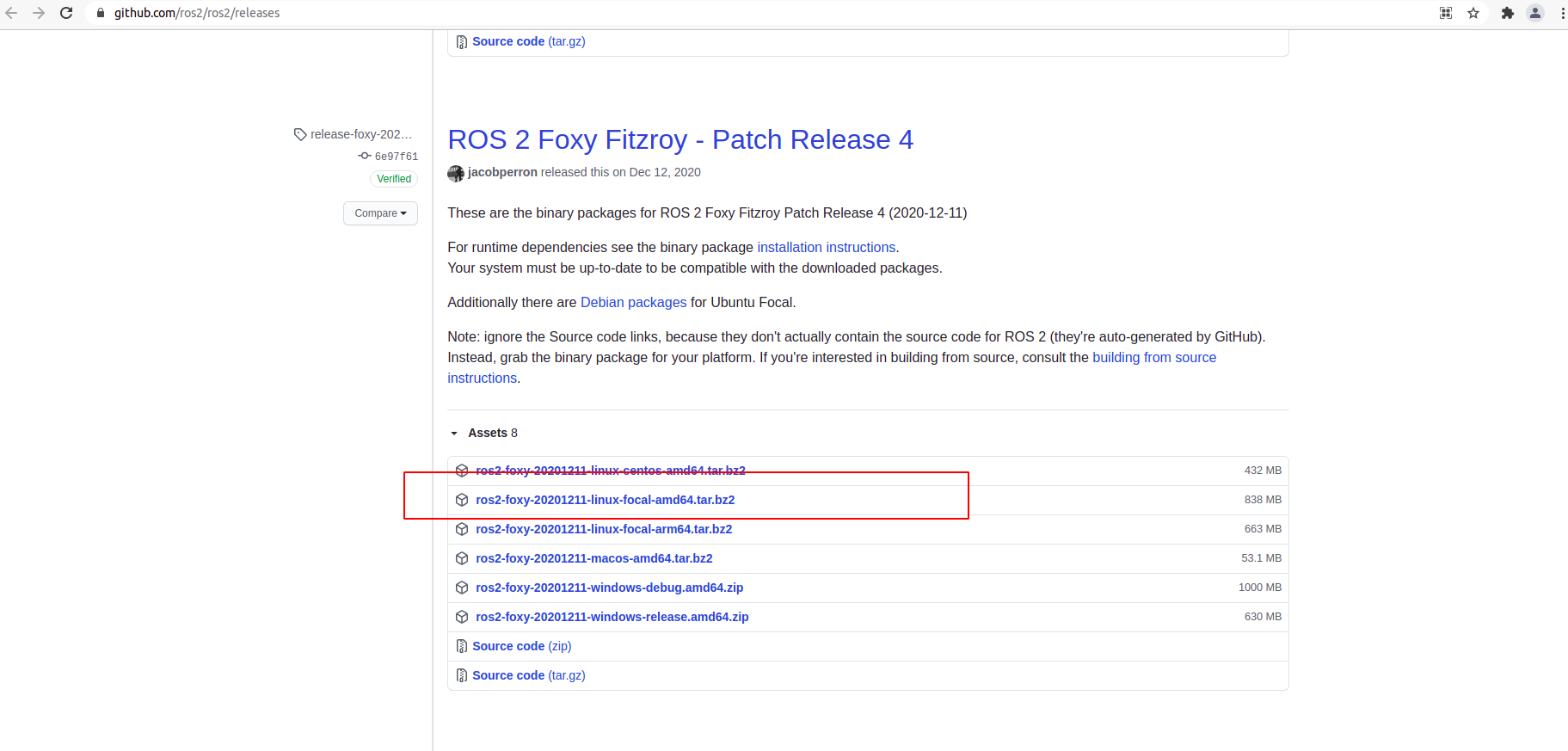
解压下载好的压缩包
mkdir -p /home/ubuntu/ros2_foxycd /home/ubuntu/ros2_foxytar xf /root/Downloads/ros2-foxy-20201211-linux-focal-amd64.tar.bz2安装并初始化rosdep工具
apt updateapt install -y python3-rosdeprosdep initrosdep update执行rosdep update的时候,应当挂梯子,不然很难通过,正常情况下,执行这一步最好不要在root权限下,但是实际执行也没有问题,只报了一个warning安全缺少的依赖
rosdep install --from-paths /home/ubuntu/ros2_foxy/ros2-linux/share --ignore-src --rosdistro foxy -y --skip-keys "console_bridge fastcdr fastrtps osrf_testing_tools_cpp poco_vendor rmw_connext_cpp rosidl_typesupport_connext_c rosidl_typesupport_connext_cpp rti-connext-dds-5.3.1 tinyxml_vendor tinyxml2_vendor urdfdom urdfdom_headers"安装python3的库
apt install -y libpython3-dev python3-pippip3 install -U argcomplete设置环境变量并测试用例
启动发布者
source /opt/ros/foxy/setup.bashros2 run demo_nodes_cpp talker启动监听者
source /opt/ros/foxy/setup.bashros2 run demo_nodes_py listener
坑点
在执行完上述安装步骤之后,我们发现colcon并没有被装上(如果装好了,请忽略坑点),于是我们参考https://colcon.readthedocs.io/en/released/user/installation.html进行colcon编译系统的安装
选择ros2的仓库
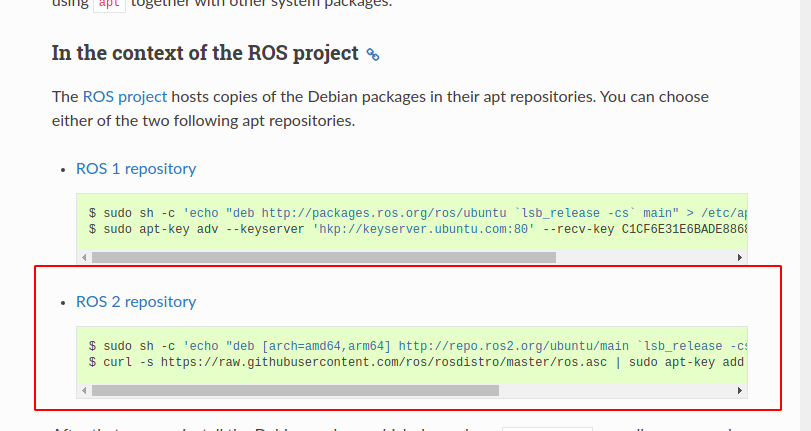
执行以下命令配置好colcon的apt仓库
sh -c 'echo "deb [arch=amd64,arm64] http://repo.ros2.org/ubuntu/mainlsb_release -csmain" > /etc/apt/sources.list.d/ros2-latest.list'curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -这一步也需要挂梯子才能快速完成安装deb包
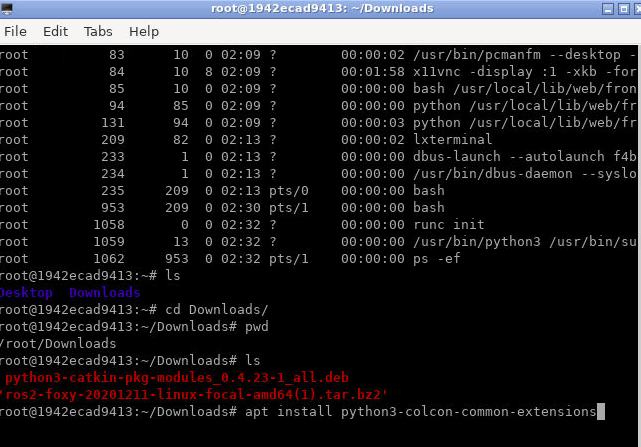
apt updateapt install python3-colcon-common-extensions执行第二步时,并不能通过,网上搜了一堆的方法,发现与此相同的报错信息和解决方法
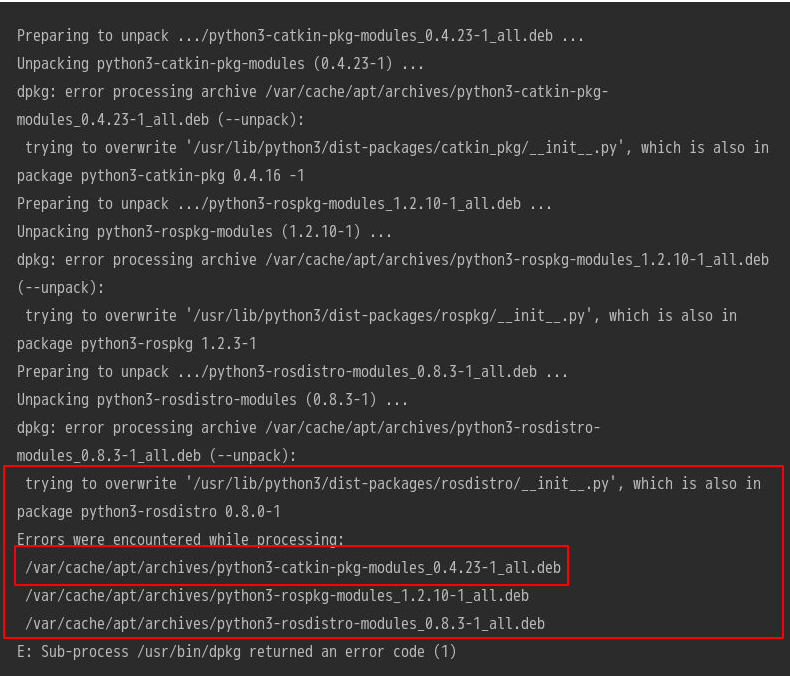
python3-catkin-pkg-modules_0.4.23-1_all.deb这个包无法装上,原因是
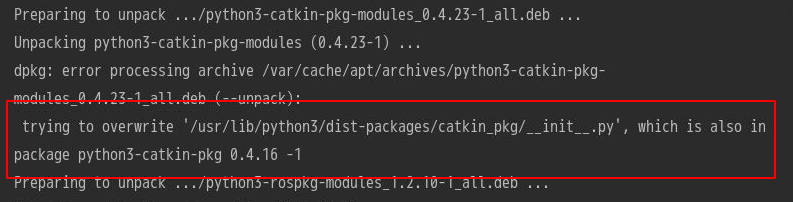
无法overwrite已经存在的其他版本的pkg
因此,我们需要强制执行覆盖overwrite操作
接下来,进入到该deb包所在的目录
cd /root/Downloads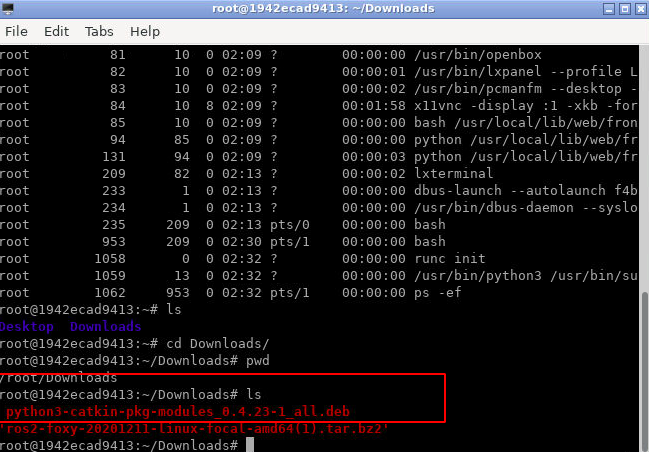
最后执行dpkg安装命令
dpkg -i --force-overwrite python3-catkin-pkg-modules_0.4.23-1_all.deb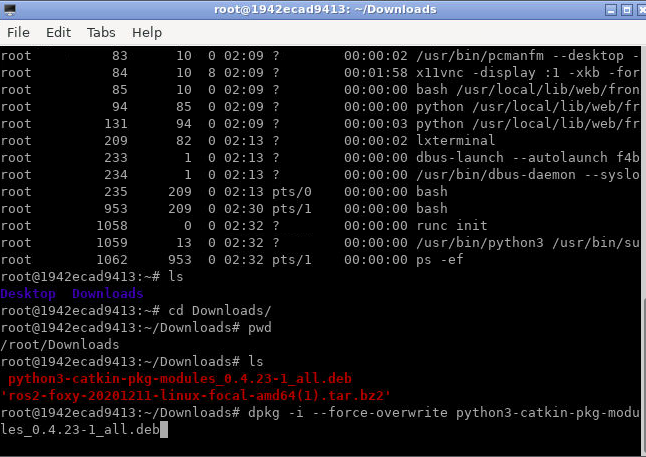
再次安装python3-colcon-common-extensions,就能通过了,这样系统中便可以使用colcon这个编译系统
安装Gazebo
one-liner安装方式
安装
新开命令行窗口LXTerminal
curl -sSL http://get.gazebosim.org | sh运行
gazebo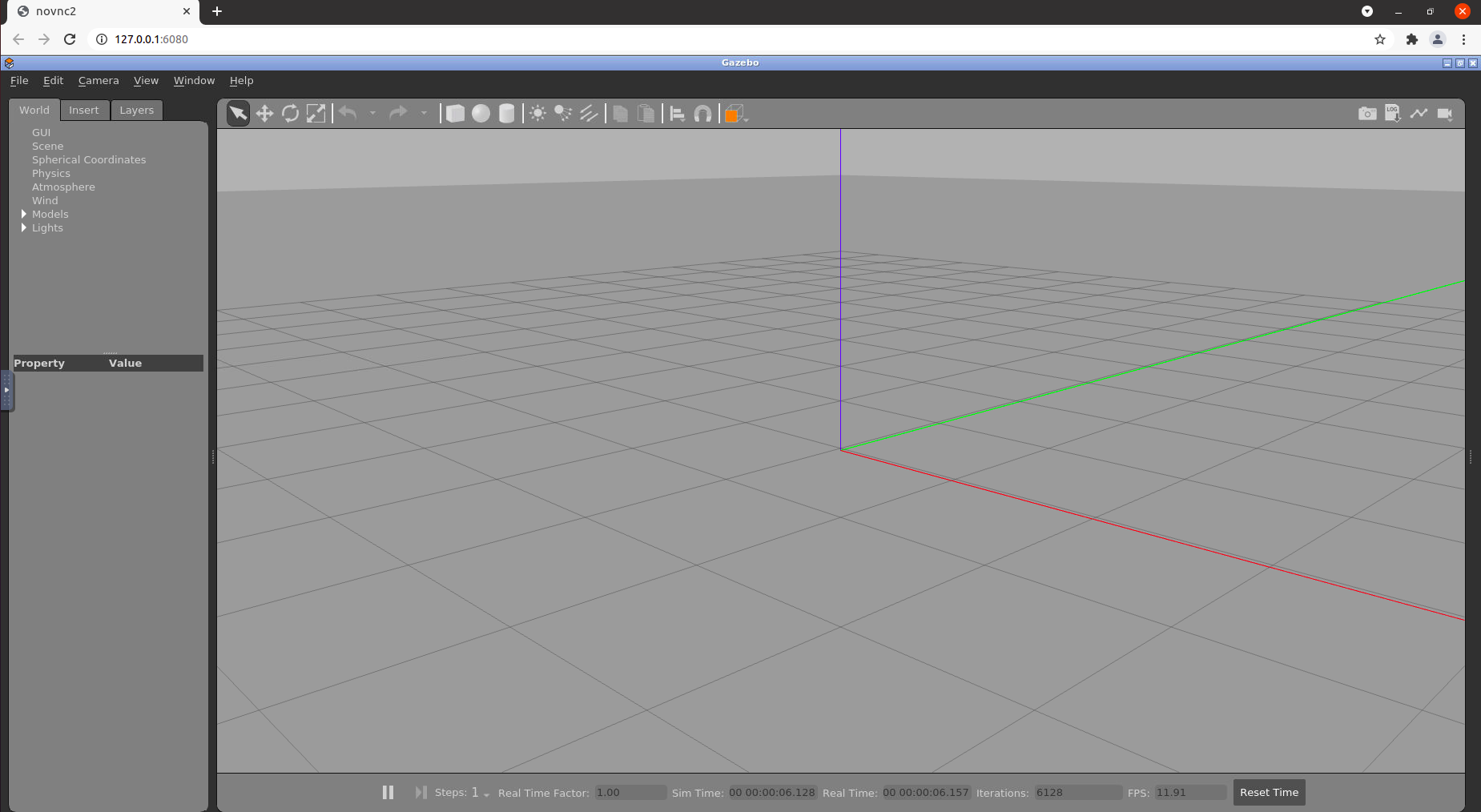
坑点
- one-liner安装方式推荐在梯子下执行,不然可能无法解析网页
运行robot_sim项目
按照官方教程安装gazebo_ros_pkgs
链接http://gazebosim.org/tutorials?tut=ros2_installing&cat=connect_ros
deb包安装
sudo apt install ros-foxy-gazebo-ros-pkgs
克隆并编译运行robot_sim项目
编译(新开命令行窗口LXTerminal)
source /opt/ros/foxy/setup.bashcd /home/ubuntu/workspace/robot_sim(此处代码放在/home/ubuntu/workspace/下)colcon builid --packages-select warehouse_robot_spawner_pkg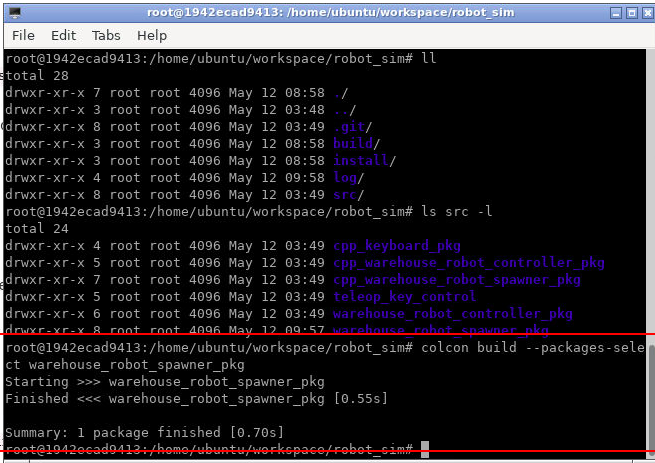
运行
source /home/ubuntu/workspace/robot_sim/install/setup.bashros2 launch warehouse_robot_spawner_pkg gazebo_world.launch.py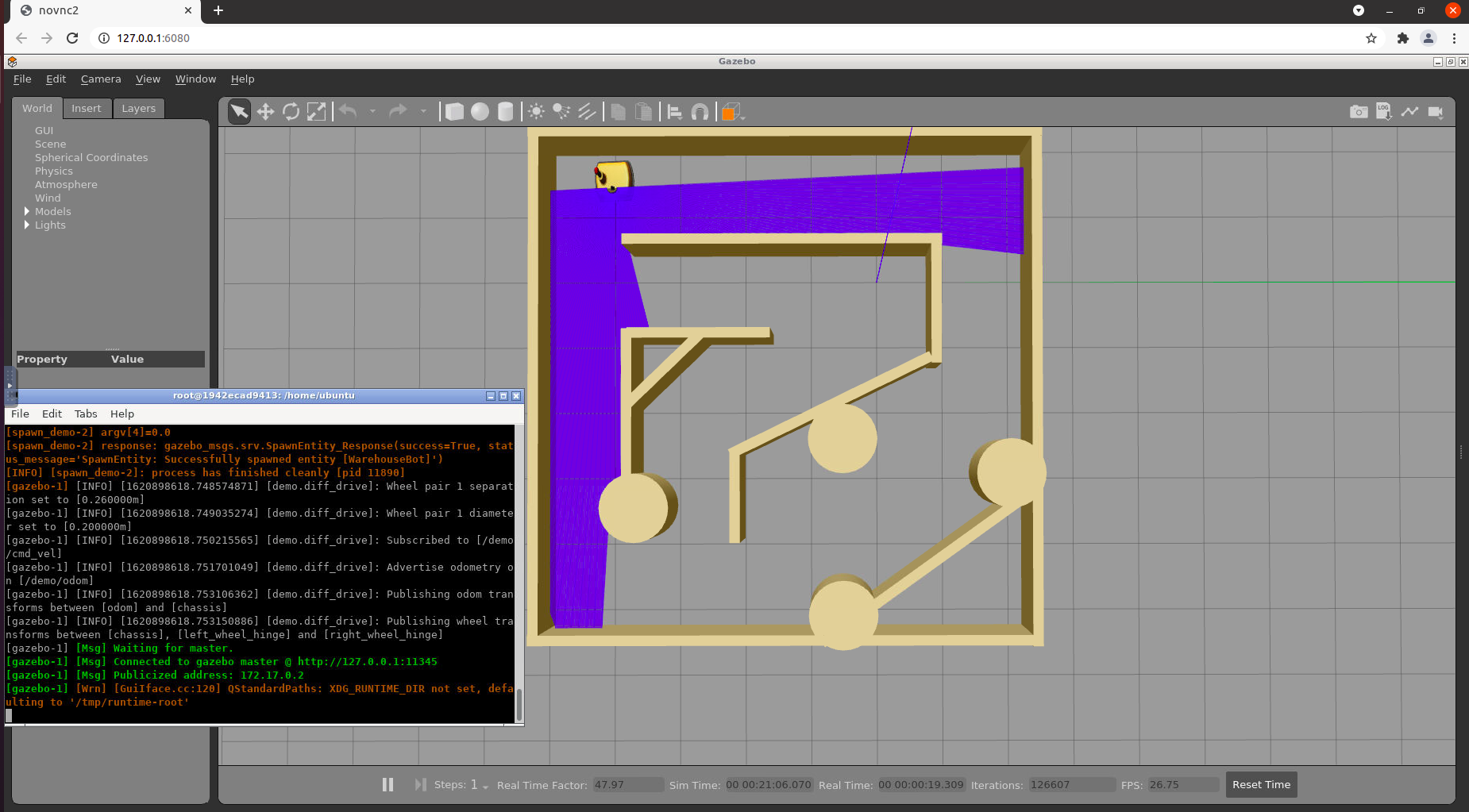
坑点
“No module named gazebo_msgs.msg”
报出这个错误,一方面可能是没有安装gazebo_ros_pkgs,另一方面,在运行前设置环境变量一定是
source /opt/ros/foxy/setup.bash,不能是source /home/ubuntu/ros2_foxy/ros2-linux/setup.bash,因为按照后者,gazebo_ros_pkgs的环境就不会被配置启动demo时需要很长时间,这是正常的,第一次启动会卡在world文件的加载过程中,之后就正常了,我们理解是需要下载model。