Dolly, the robot
dolly是一个跟随机器人,dolly的demo由ros2和Gazebo(Ignition)组合实现
Dolly的版本
| Branch | ROS | Gazebo-classic | Ignition | OS |
|---|---|---|---|---|
| crystal | Crystal | Gazebo 9 | Ubuntu Bionic | |
| dashing | Dashing | Gazebo 9 | Ubuntu Bionic, macOS Sierra | |
| eloquent | Eloquent | Gazebo 9, Gazebo 11 | Citadel | Ubuntu Bionic |
| foxy | Foxy | Gazebo 11 | Citadel | Ubuntu Focal |
Dolly的功能包集合
* dolly:元功能包,提供所有其他的功能包
* dolly_follow :实现了支持跟随逻辑的节点(node)
* dolly_gazebo:robot model,simulation world以及gazebo的launch脚本
* dolly_ignition:robot model,simulation world以及Ignition的launch脚本
Dolly show
How to install
二进制安装
dolly目前已经支持多个ros版本
ROS Packages Dashing ros-dashing-dollyros-dashing-dolly-followros-dashing-dolly-gazeboEloquent ros-eloquent-dollyros-eloquent-dolly-followros-eloquent-dolly-gazebo源码安装
安装至少一个仿真器,Gazebo或者Ignition。目前我安装的是Gazebo 11.3.0
安装合适的ros2版本,参考此处https://docs.ros.org/en/eloquent/Installation/Linux-Install-Debians.html
根据你所安装的ros2版本,clone 对应的dolly源码
1
2
3mkdir -p ~/ws/src
cd ~/ws/src
git clone https://github.com/chapulina/dolly -b <distro>为dolly的版本号:如foxy 如果安装的是Ignition,并且是Eloquent或更早的版本,需要克隆bridget
1
git clone https://github.com/ignitionrobotics/ros_ign -b <distro>
安装依赖
1
2
3
4
5
6cd ~/ws
rosdep install --from-paths src --ignore-src -r -y \
--skip-keys=ignition-math6 \
--skip-keys=ignition-msgs5 \
--skip-keys=ignition-transport8 \
--skip-keys=ignition-gazebo3Ubuntu Focal(20.04)上,无需–skip-keys参数
编译和安装
1
2cd ~/ws
colcon build- 最好是挂上代理,然后编译,如果一次没有过,可以多试几次
运行
在Gazebo中运行
设置环境变量,务必按如下顺序进行操作
1
2. /usr/share/gazebo/setup.sh
. ~/ws/install/setup.bashtip:如果在设置环境变量之后,命令
ros2 pkg list | grep dolly_gazebo的执行结果是空,那么Gazebo的依赖不会被正确设置在自建城市中启动dolly
ros2 launch dolly_gazebo dolly.launch.py world:=dolly_city.world在空的world中启动dolly
ros2 launch dolly_gazebo dolly.launch.py world:=dolly_empty.worldtip:
运行时报错
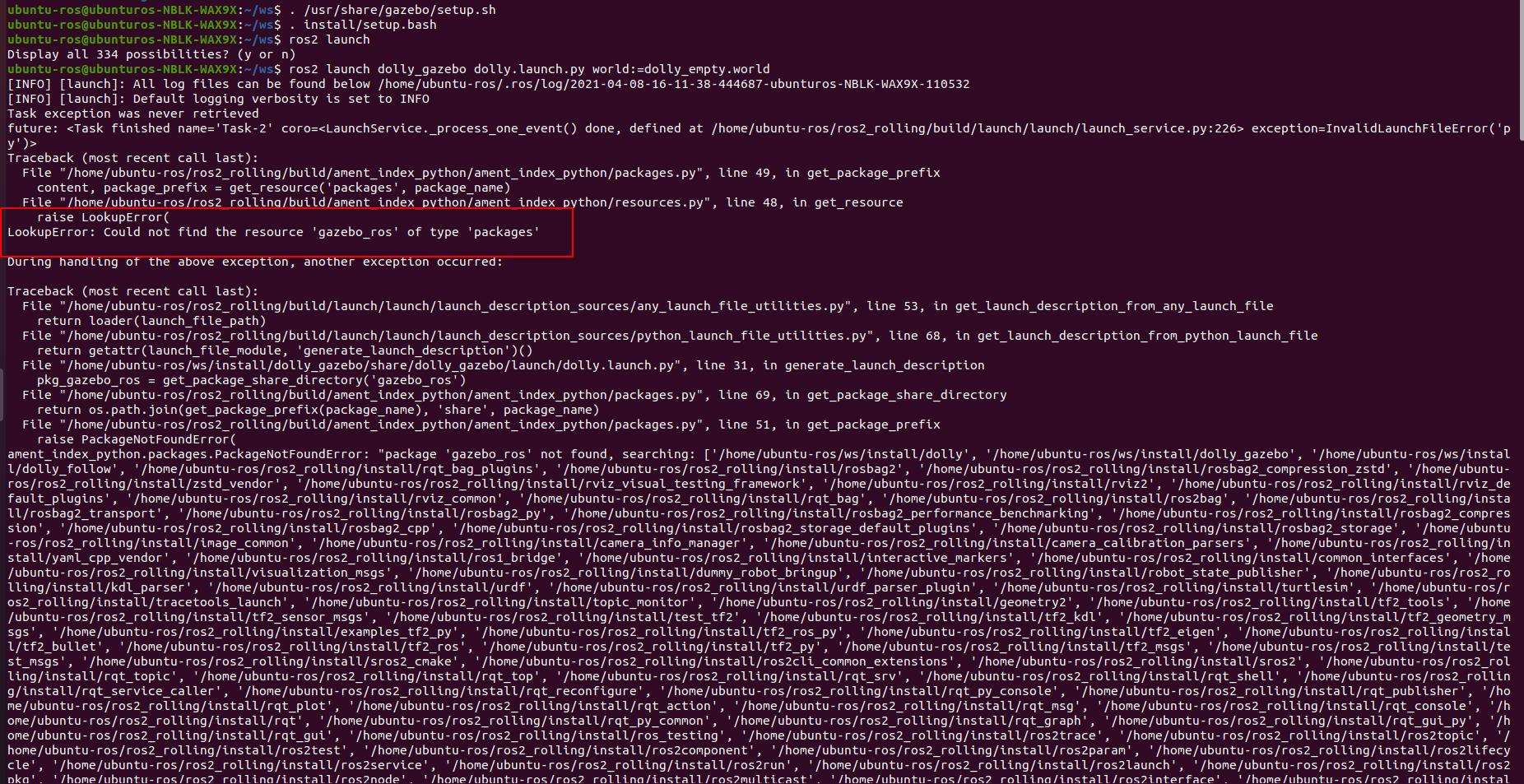
该运行错误是因为找不到gazebo_ros这个package,我们分以下几步解决这个问题
(1)安装gazebo_ros_pkgs(需要是ros2版的)
参照文档http://gazebosim.org/tutorials?tut=ros2_installing&cat=connect_ros进行操作,推荐使用debian pkg进行安装
这里使用了源码编译方式进行安装(适合于开发者),碰到以下问题
a. 最好是挂上代理进行编译
b. 编译有可能出错,需要多编译几次,或者指定失败的pkg单独编译
c. 编译某些包的时候,可能因为编译器的原因,导致单元测试失败,这里采用的 是在CmakeList将单元测试相关的内容注释掉
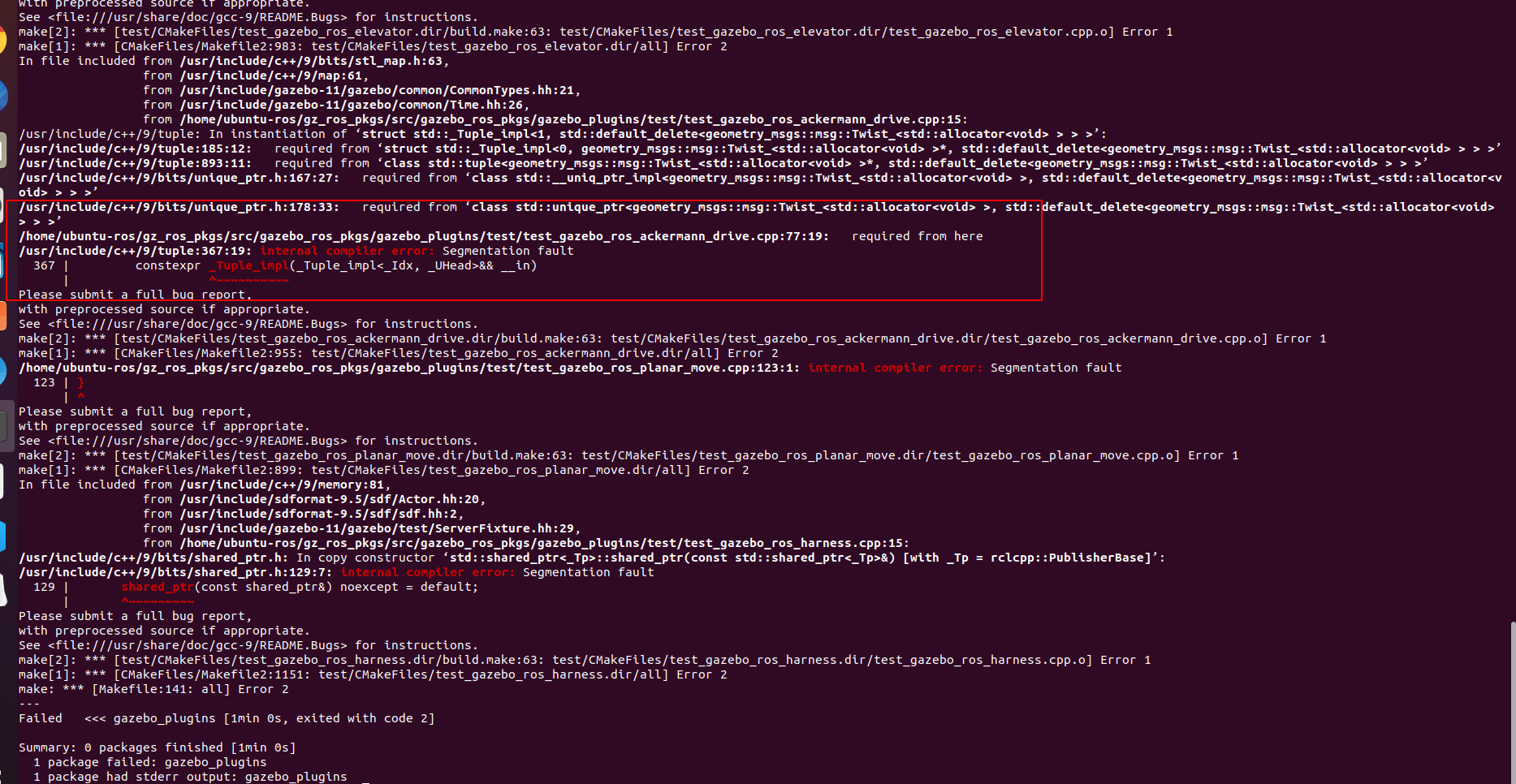
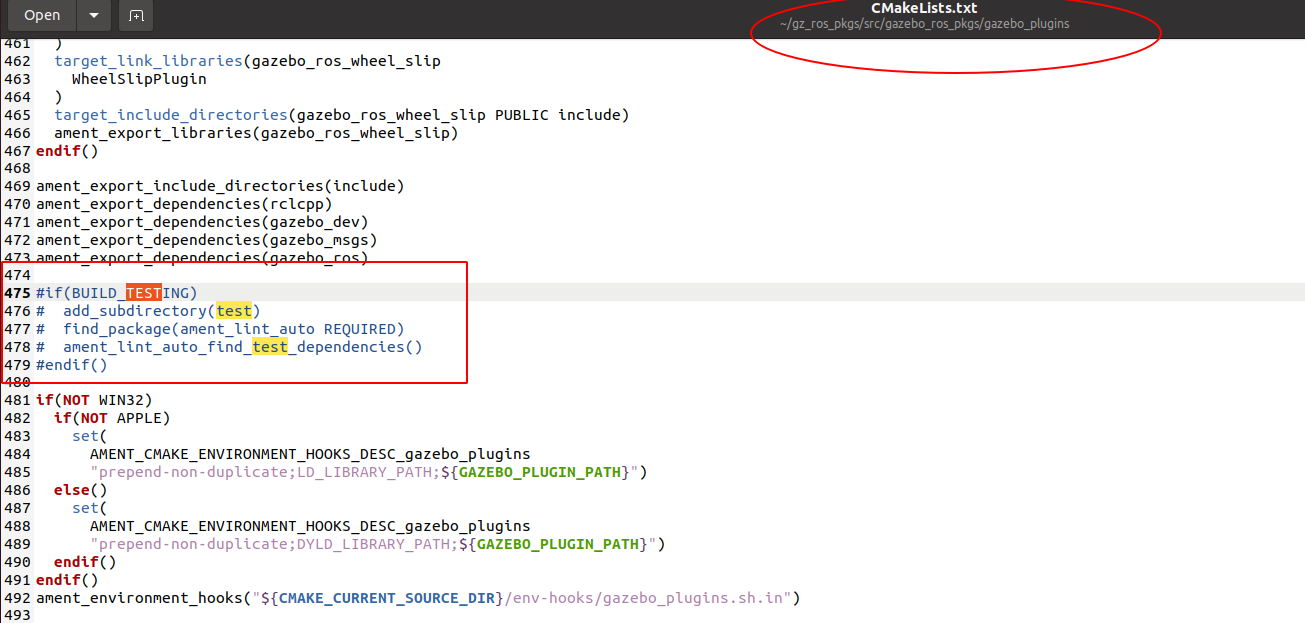

其他package(如gazebo_ros)也可能发生类似的单元测试编译报错,同样需要注释掉CmakeList中的相关内容
(2)设置环境变量时需要增加一句,如下
1
2
3. /usr/share/gazebo/setup.sh
. ~/ws/install/setup.bash
. ~/gz_ros_pkgs/install/setup.bash #需要加载gazebo_ros_pkgs的工作空间
在Ignition中运行(我们当前使用的是Gazebo,没有实践Ignition的版本,可能有坑)
设置环境变量
. ~/ws/install/setup.bashtip:如果在设置环境变量之后,命令
ros2 pkg list | grep dolly_ignition的执行结果是空,那么Ignition的依赖不会被正确设置在一个station中启动dolly
ros2 launch dolly_ignition dolly.launch.py
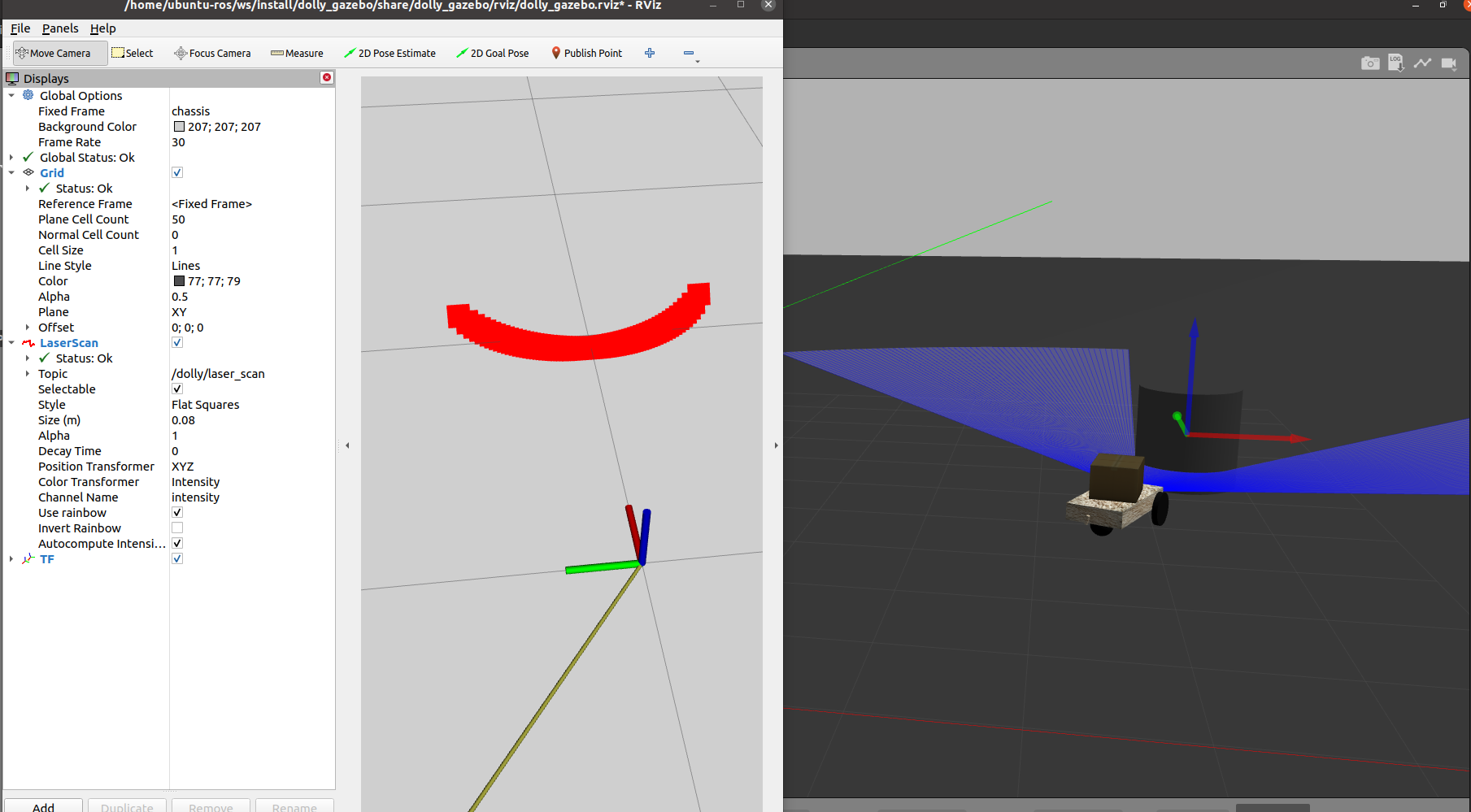
实测结果
ros2 launch dolly_gazebo dolly.launch.py world:=dolly_empty.world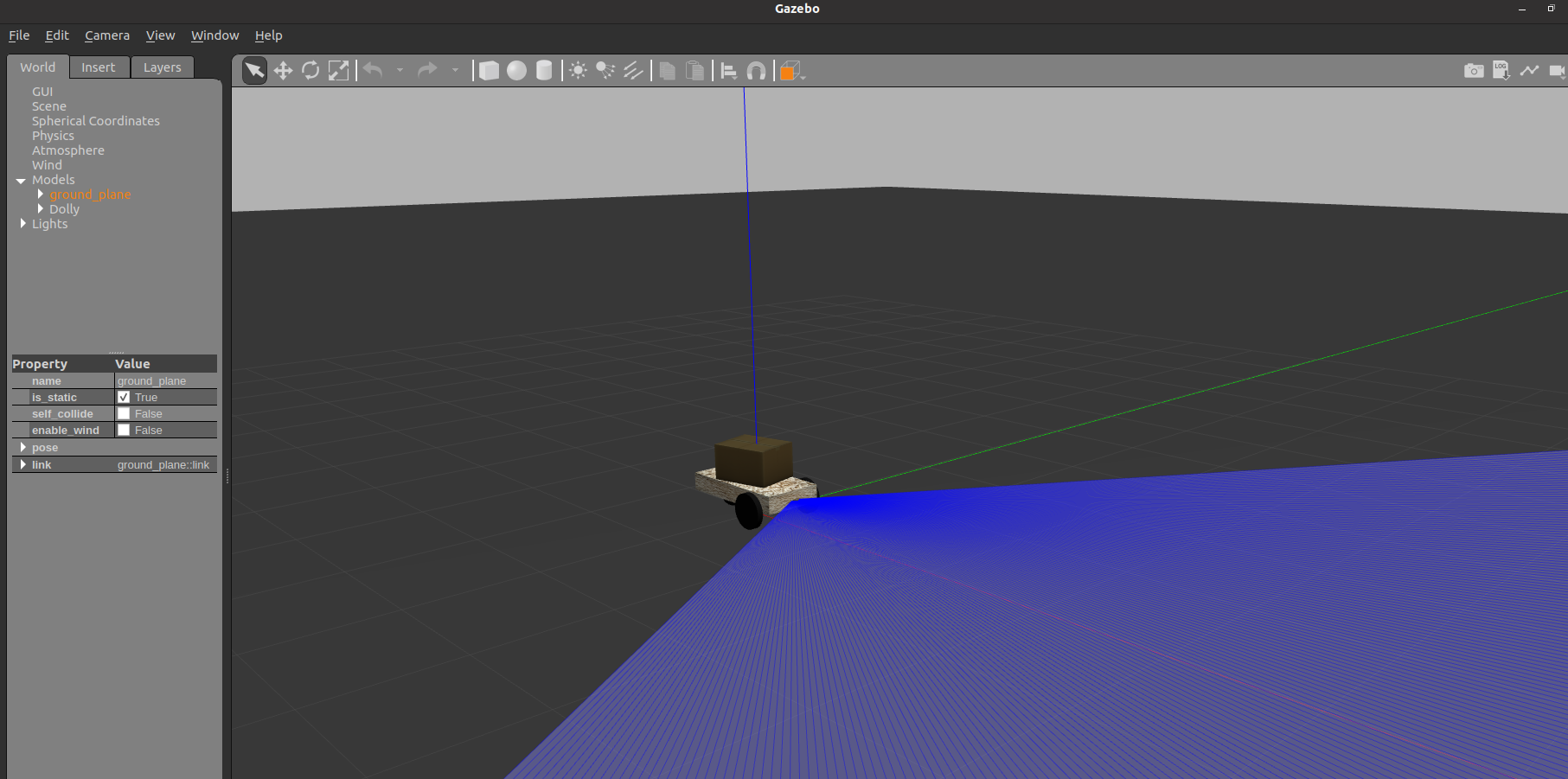
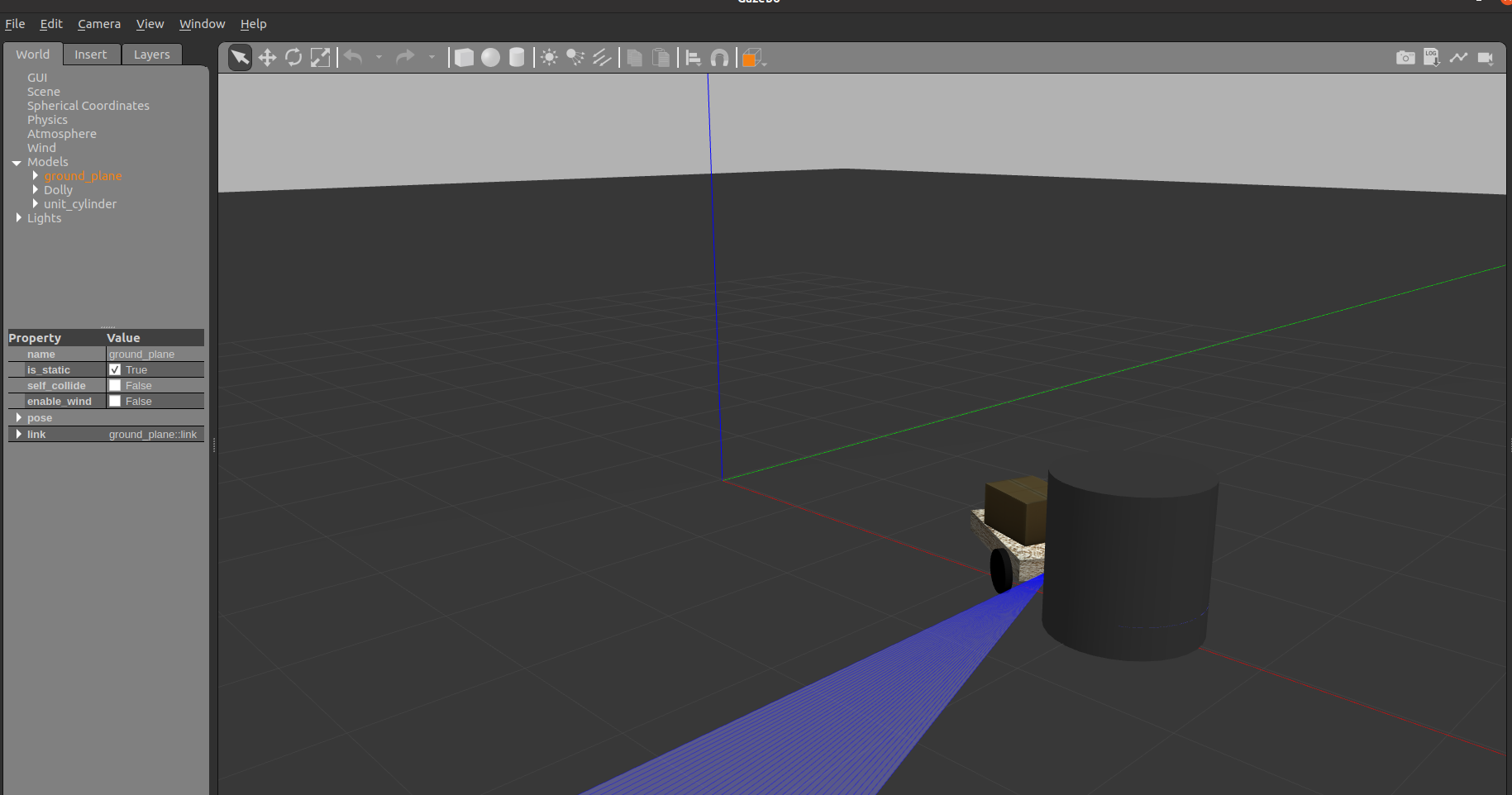
ros2 launch dolly_gazebo dolly.launch.py world:=dolly_city.world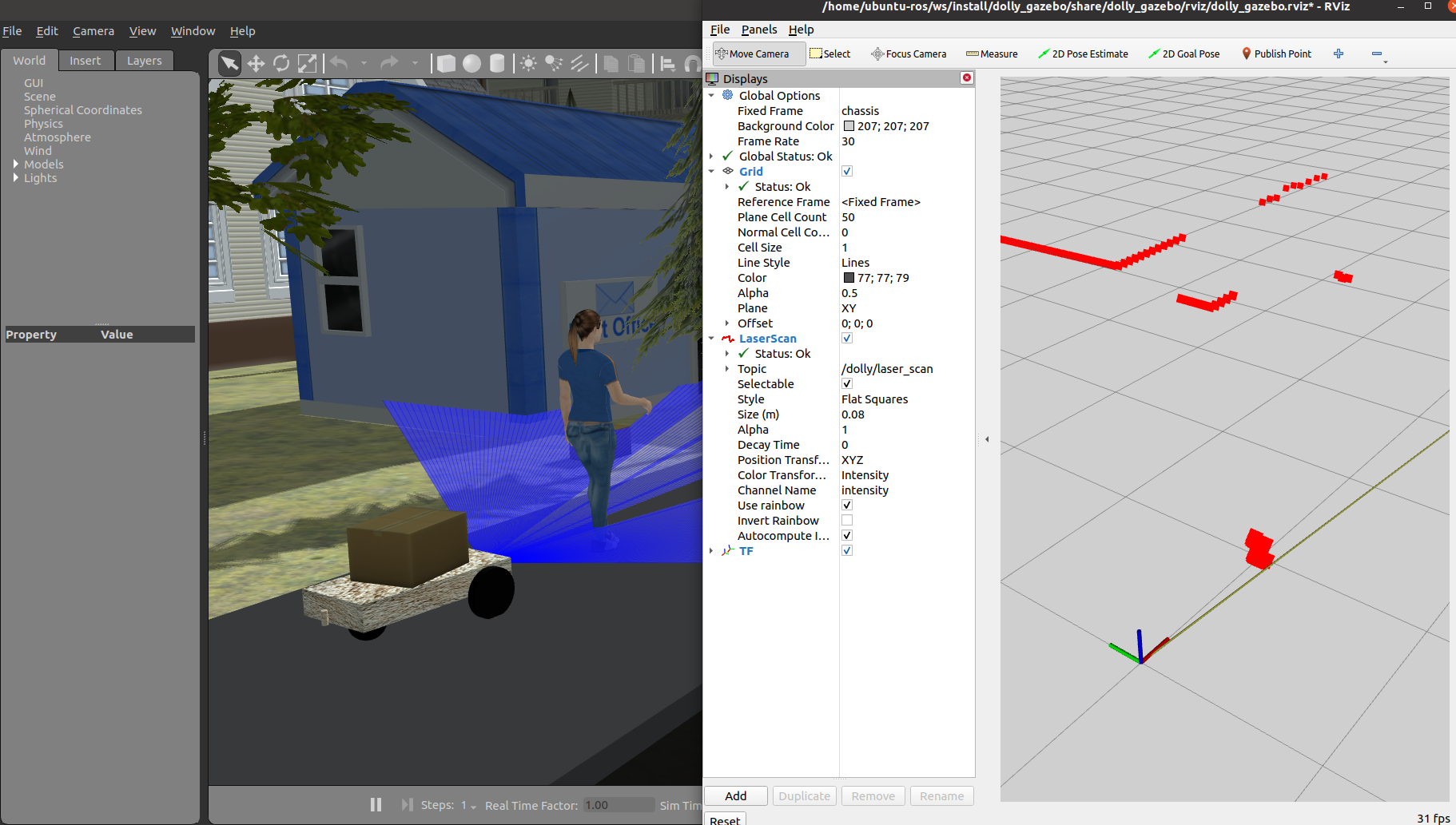
tips: 在启动之后,会报出如下错误
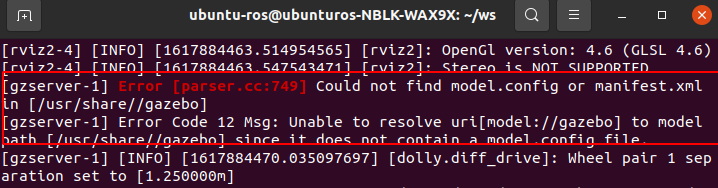
查看/usr/share/gazebo路径下,确实没有model.config这个文件
并且我们发现存在/usr/share/gazebo-11这个文件夹,因为我们安装的就是gazebo11
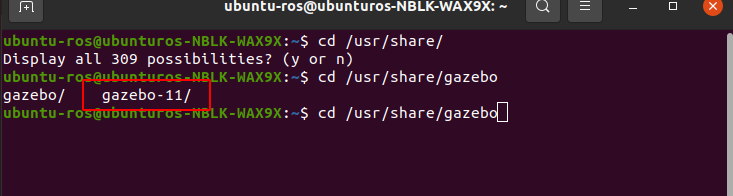
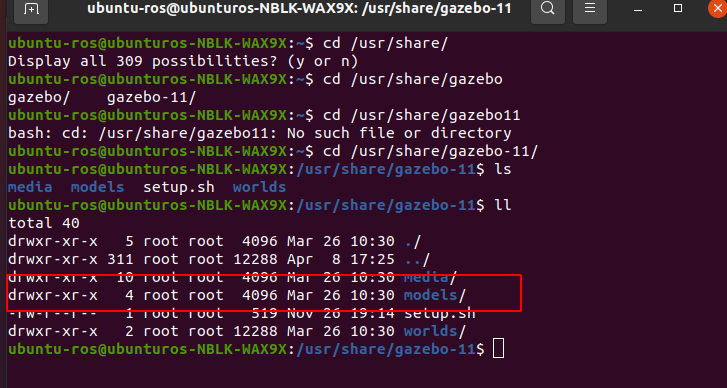
因此在运行前设置环境变量时,
. /usr/share/gazebo/setup.sh变更为. /usr/share/gazebo-11/setup.sh`,解决此问题